コラム
ミリ波レーダの基礎と自動車への応用
2026/01/15
雨や霧など悪天候にも強い!ミリ波レーダが支える自動運転の未来
今回は、防衛大学の山本先生・亀井先生に「ミリ波レーダ」について解説していただきます。ミリ波レーダは、雨や霧などの悪天候に強く、クルマの安全運転を支える重要なセンサです。速度と距離を同時に測れる特性に加え、カメラやLiDARと組み合わせることで、より賢い自動運転が実現へ――その仕組みと未来をわかりやすく紹介します。
ミリ波レーダの基礎と自動車への応用
ITSとは?交通をスマートにする仕組み
ITS(Intelligent Transport Systems:高度道路交通システム)は、人・道路・車両の間で情報をやり取りし、交通事故や渋滞、環境問題といった課題を解決するための仕組みです。最新の通信技術や制御技術を駆使し、交通の最適化を目指します。
例えば、高速道路で車間距離を自動で調整するACC(Adaptive Cruise Control)や、低速時に障害物を検知して自動ブレーキを作動させるAEB(Autonomous Emergency Braking)は、すでに多くの車両に搭載されています。これらの技術は大型車だけでなく、乗用車にも義務化が進んでおり、安全性向上に大きく貢献しています。さらに、道路インフラと車両が通信する「協調型システム」も実用化され、単独の運転支援機能との融合が期待されています
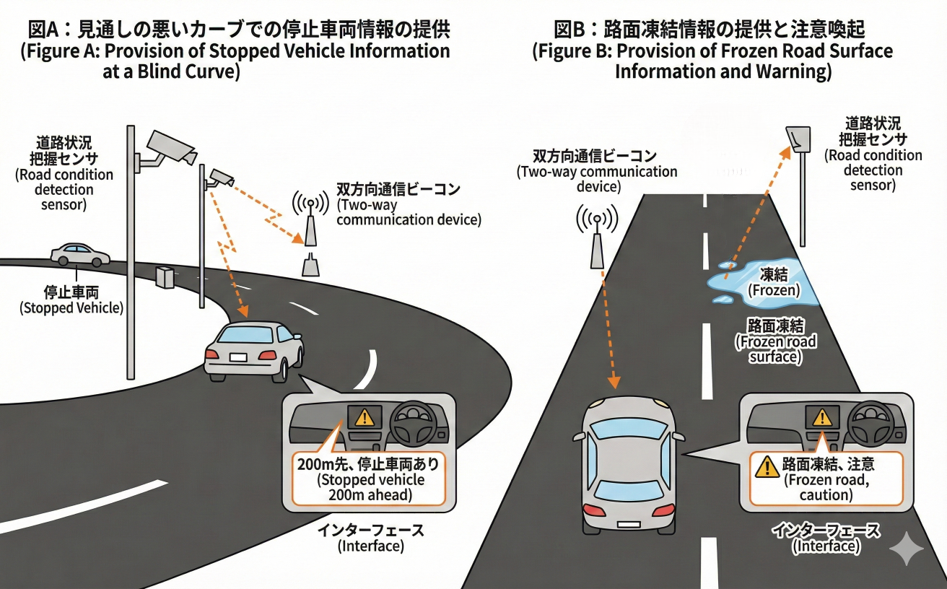
図1 ITSの利用イメージ
ミリ波レーダとは?その仕組みと進化
ミリ波とは、波長1~10mm、周波数30~300GHzの電磁波を指します。従来のレーダはマイクロ波を利用していましたが、アンテナや回路の小型化技術の進歩により、ミリ波帯も車載用途で実用化されました。
車載ミリ波レーダの主流はFMCW(周波数変調連続波)方式です。簡単に仕組みを説明すると、信号発生器がチャープ信号を(①)が、Txアンテナから発射します(②)。物体に反射した信号をRxアンテナで受信し(③)、送受信信号をミキサーで合成して中間周波数(IF信号)を生成します(④)。得られたIF信号をADCコンバータ(⑤)でデジタル信号処理することで(⑥)、対象物との距離・速度・角度を算出します。このプロセスにより、複数ターゲットの同時検知や高精度な速度推定が可能になります。
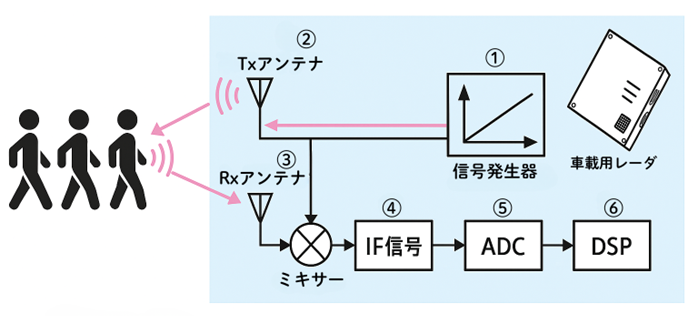
図2 ミリ波レーダの仕組み
なぜミリ波レーダが選ばれるのか?その強み
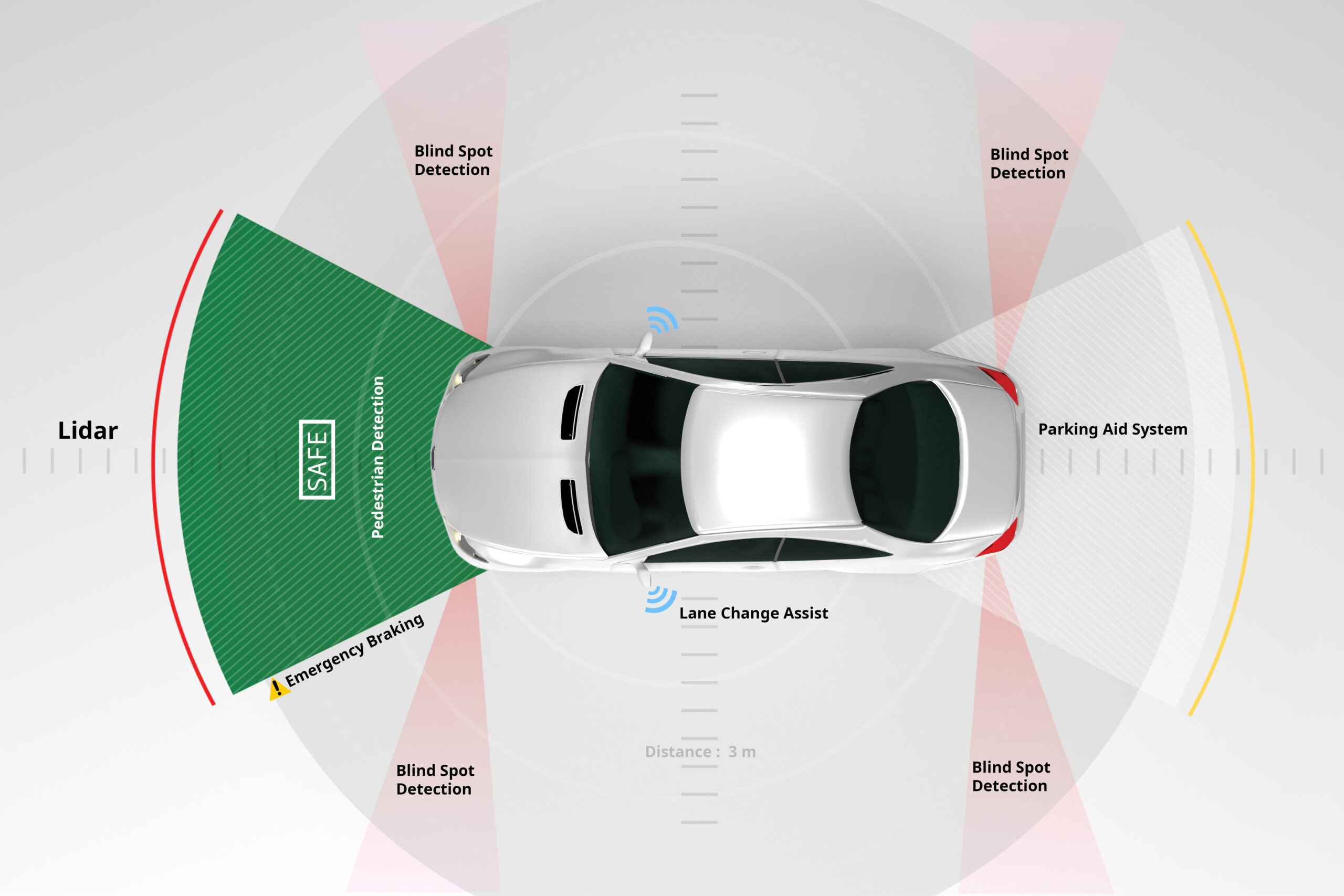
ミリ波レーダの最大の特徴は、速度と距離を同時に測定できること。さらに、霧や雨などの悪天候に強く、カメラやLiDARに比べて環境変化の影響を受けにくい点も魅力です。自動車業界では、AEBやACCなどの先進運転支援システム(ADAS)に広く採用されています。周波数帯は、長距離検知用の76GHz帯に加え、近距離用の24GHz帯から、より広い帯域幅が確保できる高分解能の79GHz帯への移行が進行中です。これにより、歩行者や二輪車の検出精度が向上し、事故の未然防止など、道路交通全体の安全性がさらに高まっています。

図3 車載レーダのイメージ
これからのITSとミリ波レーダの展望
今後は、車両単独の認識能力とインフラとの協調が融合し、より高度な自動運転が実現します。ミリ波レーダは、カメラやLiDARとのセンサフュージョンにより、複雑な都市環境でも高精度な認識を可能にします。さらに、ソフトウェアの進化により、レーダが単なる距離計測装置から「環境理解センサ」へと進化していくでしょう。ITSとミリ波レーダの組み合わせは、交通事故ゼロ、渋滞解消、環境負荷低減という未来を現実に近づける鍵となります。
【編集後記】
ミリ波レーダは、これまでの「距離を測る装置」から、周囲の状況を理解するセンサへと進化しています。自動車だけでなく、街全体の交通システムとつながることで、事故ゼロや渋滞解消といった未来が現実に近づいています。技術がどのように私たちの暮らしを変えていくのか、夢が広がります。
旭化成では、ミリ波レーダに関連する製品ラインアップもございます、詳細はこちらのページをご覧ください。
執筆者

山本孝
1980年3月、京都大学大学院工学研究科博士課程電子工学専攻を修了後、日本シーメンス株式会社に入社。その後、株式会社村田製作所を経て、1981年8月より防衛大学校電気工学教室の助手として学術キャリアを開始。
1984年にはカリフォルニア大学マテリアル科学工学科およびローレンス・バークレー研究所にて客員研究員として国際的な研究活動に従事。1987年、防衛大学校講師、1988年助教授、1994年教授に昇任し、電子工学・通信工学分野で教育・研究を牽引。2000年以降は通信工学科教授として、電磁波応用技術や高周波材料の研究を深化させた。
2014年、防衛大学校を定年退職後、名誉教授に就任。その後、2016年から2025年まで大阪府立大学(大阪公立大学)客員教授を歴任。
執筆者

亀井利久
1993年3月、玉川大学大学院工学研究科博士後期課程(生産開発工学専攻)を修了。
同年、防衛大学校に助手として着任。1998年から1999年にかけて、米国カリフォルニア工科大学で客員研究員を務め、35GHz帯モードコンバータの開発に携わる。
2007年10月、防衛大学校講師に昇任し、現在は同校准教授。博士(工学)。研究分野は、マイクロ波帯導波管を用いた回路設計、移動体通信向け小型アンテナ、液晶材料のミリ波・マイクロ波応用技術、流星バースト通信システム、電波吸収体材料定数推定法の研究、さらに現在は電波観測によるドローンキャプチャ技術の研究に従事。
この記事をシェアする
![]()